









Adafruit N20 DC-motor med magnetisk kodare - 6V med utväxling 1:100
Beskrivning
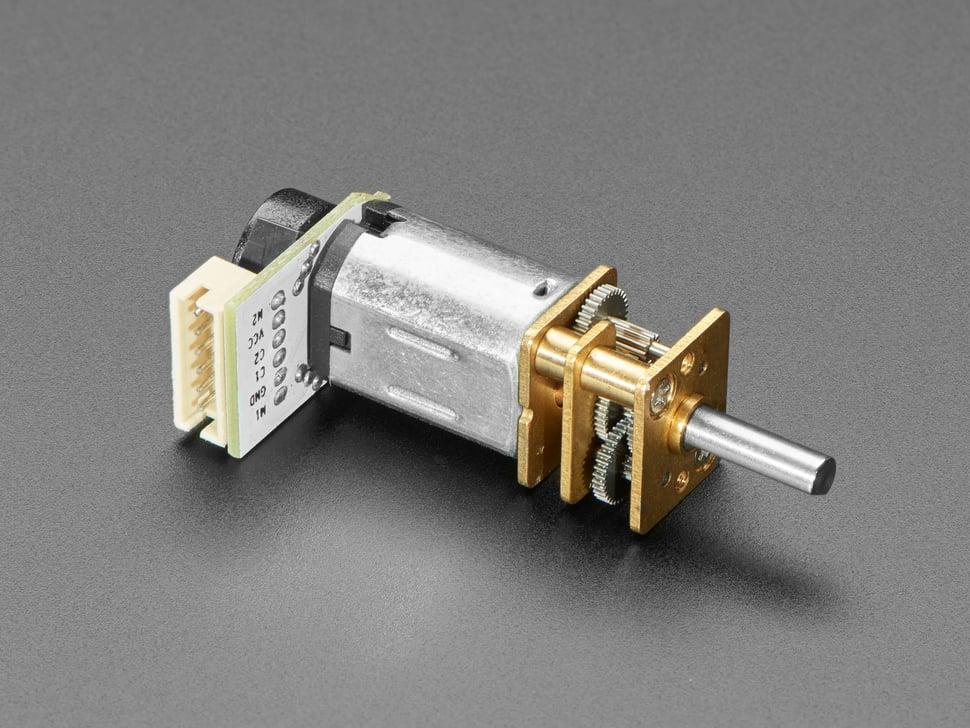
Det första steget i robotprojekt är att få en motor att snurra. Men alla motorer arbetar inte med samma hastighet, även med identiska artikelnummer, på grund av variationer i spänning, miljö och tillverkning. Nästa viktiga steg är att bestämma motorns hastighet, en utmanande uppgift som förenklas genom att lägga till ett kodningshjul och en optisk eller magnetisk räknare. När motorn roterar snurrar kodningshjulet, vilket gör att räknaren kan detektera varje eker, vilket möjliggör hastighetsberäkningar. Förbättra funktionaliteten genom att lägga till en andra räknare för att bestämma riktningen.
Denna motor effektiviserar processen med ett integrerat magnethjul och två Hall-effektsensorer. Som en kompakt motor i N20-storlek arbetar den smidigt med 4,5 till 6 V DC. Anslut de vita och röda kablarna till din motordrivare för hastighetsjustering och riktningskontroll med hjälp av PWM och en H-brygga. Den blå kabeln ansluts till din mikrokontrollers jordstift, medan den svarta kabeln anpassar sig till alla 3-5 V DC-källor. Hall-effektutgångar är tillgängliga via de gula och gröna kablarna.
En Arduino exempelskiss medföljer men kan anpassas för andra språk. Den innebär att man avbryter en av kodarens pinnar, räknar tiden sedan det senaste avbrottet och multiplicerar räknetiden med 14 räkningar per varv och utväxlingen. Denna motor har en utväxling på 1:100, använder 6V nominell effekt och drar cirka 100mA (200mA vid stillastående). Utväxlingen påverkar vridmoment och varvtal men inte strömförbrukningen.
Egenskaper
| varumärke | Adafruit |
| Modell | 4639 |
Levereras inom 10 till 12 dagar
 Adafruit N20 DC-motor med magnetisk kodare - 6V med utväxling 1:100 Levereras inom 10 till 12 dagar € 20,15
Adafruit N20 DC-motor med magnetisk kodare - 6V med utväxling 1:100 Levereras inom 10 till 12 dagar € 20,15 Kundfrågor
Recensioner
- Nedsatt I lager -50 % Adafruit Vit LED-bakgrundsbelysningsmodul - Liten 12mm x 40mm € 2,80 € 1,40 Visa produkt
- Nedsatt I lager -49 % Adafruit JST-PH 2-stifts SMT rätvinklat Breakout Board € 2,15 € 1,10 Visa produkt
- Nedsatt I lager -50 % Adafruit Mini metallhögtalare med kablar - 8 ohm 0,5W € 2,80 € 1,40 Visa produkt
- Nedsatt I lager -50 % Adafruit Staplingsbara headers för Feather - 12-poliga och 16-poliga honkontakter € 1,80 € 0,90 Visa produkt
- Nedsatt 3 pieces I lager -50 % Adafruit LED-glödtråd - 3V 26mm lång - Varmvit 3-pack € 6,55 € 3,30 Visa produkt
- Nedsatt I lager -49 % Adafruit Ensidig flexibel LED-tråd - 3V 25 mm lång - Grön € 3,65 € 1,85 Visa produkt
- Nedsatt I lager -50 % Adafruit NOOds - Flexibel LED Filament - 3V 300mm lång - Gul € 10,80 € 5,40 Visa produkt
- Nedsatt I lager -50 % Adafruit Ultimate GPS HAT för Raspberry Pi A+/B+/Pi 2/3/4/Pi 5 € 43,05 € 21,55 Visa produkt
- Nedsatt I lager -50 % Adafruit Vattentät polariserad 4-tråds kabelsats € 3,60 € 1,80 Visa produkt
- Nedsatt I lager -50 % Adafruit IR-brytstrålesensor med premiumtrådsändar - 5 mm lysdioder € 8,55 € 4,30 Visa produkt
- Nedsatt I lager -50 % Adafruit Högtalare - 3" Diameter - 4 Ohm 3 Watt € 2,80 € 1,40 Visa produkt
- Nedsatt I lager -49 % Adafruit Vattentät DC-strömkabelsats - 5,5/2,1 mm € 3,65 € 1,85 Visa produkt
- Nedsatt I lager -50 % Adafruit NOOds - Flexibel LED Filament - 3V 300mm lång - Röd € 10,80 € 5,40 Visa produkt
- Nedsatt I lager -50 % Adafruit Vävt ledande tyg - 20 cm kvadrat € 7,15 € 3,55 Visa produkt
- Nedsatt 10 pieces I lager -50 % Adafruit Break-away 0,1" 36-stifts remsa hanhuvud - Rainbow Combo 10-pack € 7,15 € 3,55 Visa produkt
Nyligen besökta artiklar
- Adafruit N20 DC-motor med magnetisk kodare - 6V med utväxling 1:100 € 20,15 Visa produkt
- Adafruit 3,5 mm (1/8") 4-polig (TRRS) ljudkontaktkopplingsplint € 6,75 Visa produkt
- Adafruit Mini oval högtalare med korta sladdar - 8 ohm 1 watt € 5,95 Visa produkt
- Adafruit 1,25 mm pitch 3-polig kabelmatchningspar - 40 cm lång € 4,40 Visa produkt