









Adafruit N20 DC-motor med magnetisk kodare - 6V med utväxling 1:150
Beskrivning
Det första steget i ett robotprojekt innebär att få en motor att snurra, vilket avslöjar variationer i hastighet på grund av spänning, miljö och tillverkningsskillnader. För att noggrant mäta motorns hastighet kan ett kodningshjul fästas, tillsammans med en optisk eller magnetisk räknare. Denna kombination gör att din mikrokontroller kan räkna de passerande ekrarna och effektivt bestämma hastigheten.
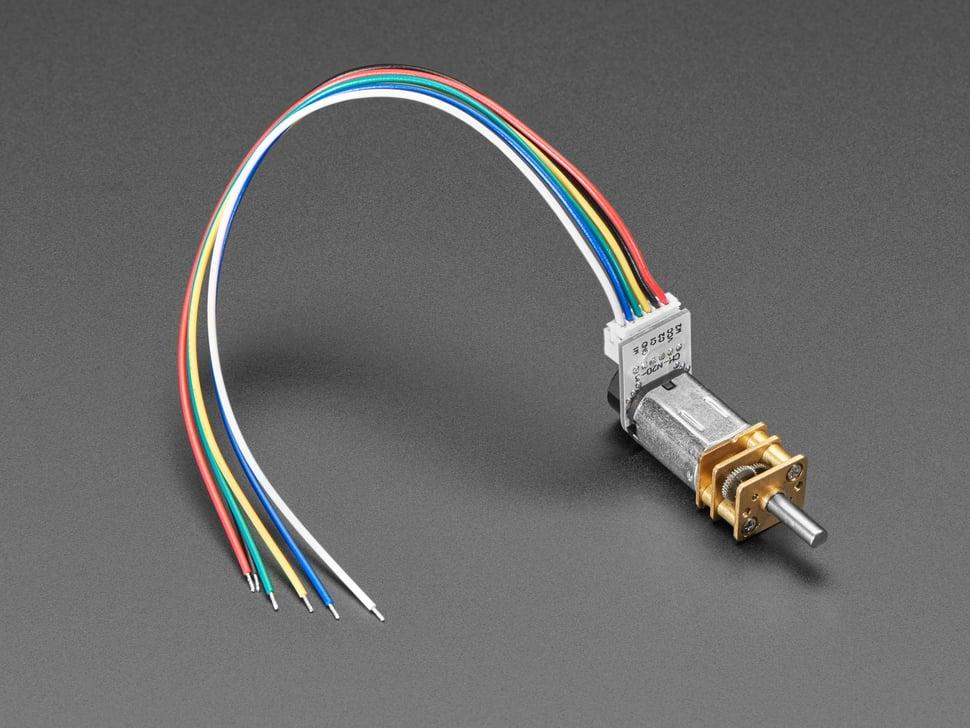
Förbättra din installation genom att lägga till en andra räknare för att detektera riktning tillsammans med hastighet, vilket förenklar processen med vår specialdesignade motor. Denna motor, inte bara kompakt i standard N20-storlek, är utrustad med ett magnethjul och två förmonterade halleffektsensorer, vilket säkerställer sömlös integration.
Motorn fungerar optimalt med en spänning på 4,5 till 6 V DC genom sina vita och röda ledningar, som ansluts till din motordrivare och möjliggör hastighetsjustering via PWM med en H-brygga. Jorda den blå ledningen till din mikrokontroller, mata 3–5 V DC till den svarta ledningen och läs av halleffektutgångarna från de gula och gröna ledningarna för exakt feedback.
En exempelskiss finns tillgänglig för Arduino , anpassningsbar till andra programmeringsspråk, som använder avbrott på kodstift för att beräkna hastighet. Denna motor har en utväxling på 1:150, kräver 6V nominell effekt och drar cirka 100mA, med en topp på 200mA när den är stillastående. Utväxlingen justerar vridmoment och varvtal utan att påverka strömförbrukningen, vilket ger mångsidighet för olika applikationer.
Egenskaper
| varumärke | Adafruit |
| Modell | 4640 |
ETA är inte känt
 Adafruit N20 DC-motor med magnetisk kodare - 6V med utväxling 1:150 € 16,05
Adafruit N20 DC-motor med magnetisk kodare - 6V med utväxling 1:150 € 16,05 Kundfrågor
Recensioner
- I lager Adafruit Vit LED-bakgrundsbelysningsmodul - Medium 23mm x 75mm € 3,40 Visa produkt
- I lager Adafruit Vattentät DC-strömkabelsats - 5,5/2,1 mm € 3,40 Visa produkt
- I lager Adafruit Kopplingsdäcksvänlig SPDT-skjutbrytare € 1,30 Visa produkt
- I lager Adafruit Liten sluten piezo med kablar € 1,30 Visa produkt
- I lager Adafruit Mini metallhögtalare med kablar - 8 ohm 0,5W € 2,60 Visa produkt
- I lager Adafruit JST PH 2-polig kabel – hankontakt 200 mm € 1,05 Visa produkt
- I lager Adafruit Liten krokodilklämma till hane-jumperkabelpaket - 6 delar € 6,65 Visa produkt
- I lager Adafruit NOOds - Flexibel LED Filament - 3V 300mm lång - Limegrön € 9,05 Visa produkt
- I lager Adafruit NOOds - Flexibel LED Filament - 3V 300mm lång - Varmvit € 5,95 Visa produkt
- I lager Adafruit Vävt ledande tyg - 20 cm kvadrat € 6,50 Visa produkt
- I lager Adafruit Ensidiga nOOds - 128 mm långa flexibla LED-filament - Blå 3V € 5,20 Visa produkt
- I lager Adafruit Micro Lipo - USB LiIon/LiPoly laddare € 7,75 Visa produkt
- 5 pieces I lager Adafruit NeoPixel Diffuserad 5mm Genomgående LED - 5-pack € 6,50 Visa produkt
- I lager Adafruit Stereo sluten högtalarsats - 3W 4 Ohm € 9,60 Visa produkt
- I lager Adafruit bq25185 USB / DC / Solcellsladdare med 3.3V Buck-kort € 11,65 Visa produkt
Nyligen besökta artiklar
- Adafruit N20 DC-motor med magnetisk kodare - 6V med utväxling 1:150 € 16,05 Visa produkt
- Adafruit Sparky det magiska blå rökmonstret - Klistermärke! € 2,10 Visa produkt
- Adafruit Transistor Herrskjorta - Herr 4X-Large € 44,45 Visa produkt
- Adafruit Bakelit Universal Perfboard Tallrikar - 10-pack € 6,50 Visa produkt
- Adafruit Sy-din-egen-ugglekit - Cynthia Treen Studio € 25,35 Visa produkt
- Adafruit stereo FM-sändare med RDS/RBDS-brytare - Si4713 € 25,35 Visa produkt
- Adafruit Theo Jansens Mini Strandbeest Kit från Gakken € 63,55 Visa produkt
- Adafruit Mässingsavståndshållare M2.5 för Pi HATs - Svartpläterade - 2-pack € 1,05 Visa produkt
- Adafruit VGA till HDMI ljud- och videoadapter € 19,15 Visa produkt
- Adafruit Termoelement Typ-K Glasfläta Isolerad - 5m € 31,80 Visa produkt
- Adafruit #ElectronicHalloween Halloween-klistermärkesark, set 1 € 2,10 Visa produkt
- Adafruit ChromaTek 19 mm robust momentan metalltryckknapp med NeoPixel € 25,60 Visa produkt
- Adafruit Klar turbinvattenflödessensor med 3-polig JST € 8,30 Visa produkt