









Pololu Dual G2 High-Power Motor Driver 18v18 för Raspberry Pi (monterad)
Beskrivning Vänster Bilagor
Detta tilläggskort gör det enkelt att styra två högeffekts DC-motorer med en Raspberry Pi. Dess dubbla diskreta MOSFET H-bryggor stöder ett brett 6,5 V till 30 V driftområde och är tillräckligt effektiva för att leverera kontinuerliga 18 A utan kylfläns. Drivrutinerna erbjuder grundläggande strömbegränsande funktionalitet och de accepterar ultraljuds-PWM-frekvenser för tystare drift. Standardpin-mappningarna gör det enkelt att komma igång, men de kan anpassas för mer specialiserade applikationer. Denna version levereras helt monterad med kontakter inlödda.
Minsta driftspänning för alla fyra versionerna är 6,5 V, medan de maximala driftspänningarna anges i tabellen ovan. Kortet innehåller också en integrerad 5 V, 2,5 A switchande nedstegsregulator som kan användas för att driva Raspberry Pi den är ansluten till, vilket möjliggör drift från en enda strömkälla.
Förarens standardkonfiguration använder sex GPIO-stift för att styra motordrivrutinerna, och använder Raspberry Pi:s hårdvaru-PWM-utgångar, och den använder två extra stift för att läsa statusutgångar från drivrutinerna. Men stiftmappningarna kan anpassas om standardinställningarna inte är bekväma, och stift för strömavkänning och begränsning är tillgängliga på kortet för mer avancerade applikationer.
Kortet matchar Raspberry Pi HAT (Hardware Attached on Top) mekaniska specifikation, även om det inte överensstämmer med de fullständiga HAT-specifikationerna på grund av avsaknaden av ett ID EEPROM. (Ett fotavtryck för att lägga till ditt eget EEPROM finns tillgängligt för applikationer där ett sådant skulle vara användbart; pull-ups på SDA, SCL och WP tillhandahålls.) Det är inte praktiskt att använda detta expansionskort med den ursprungliga Raspberry Pi Model A eller Model B på grund av skillnader i deras pinout och formfaktor.
Dessa dubbla motordrivrutiner finns även tillgängliga som Arduino-sköldar. För enkanalsversioner i en mer kompakt formfaktor, överväg våra kraftfulla motordrivrutiner. För mindre, lägre effekt och billigare alternativ designade för en Raspberry Pi, överväg vår Dual MC33926 Motor Driver för Raspberry Pi, Dual MAX14870 Motor Driver för Raspberry Pi och DRV8835 Dual Motor Driver för Raspberry Pi.
Funktioner som är gemensamma för alla versioner
- PWM-drift upp till 100 kHz
- Motorindikatorlampor visar vad utgångarna gör även när ingen motor är ansluten
- Integrerad 5 V, 2,5 A switchande spänningsregulator driver Raspberry Pi-basen för drift med en strömkälla
- Python bibliotek gör det enkelt att komma igång med att använda detta kort som ett expansionskort för motordrivrutiner
- GPIO-pinmappningar kan anpassas om standardmappningarna inte är bekväma
- Strömavkännings- och begränsningsstift är exponerade för avancerad användning
- Omvänd spänningsskydd
- Underspänningsavstängning
- Kortslutningsskydd
Detaljer för denna artikel #3751
- Driftspänning: 6,5 V till 30 V (absolut max; ej avsedd för användning med 24 V-batterier)
- Utström: 18 A kontinuerlig
- Aktiv strömbegränsning (hackning) med ungefärligt standardtröskelvärde på 50 A (kan justeras lägre)
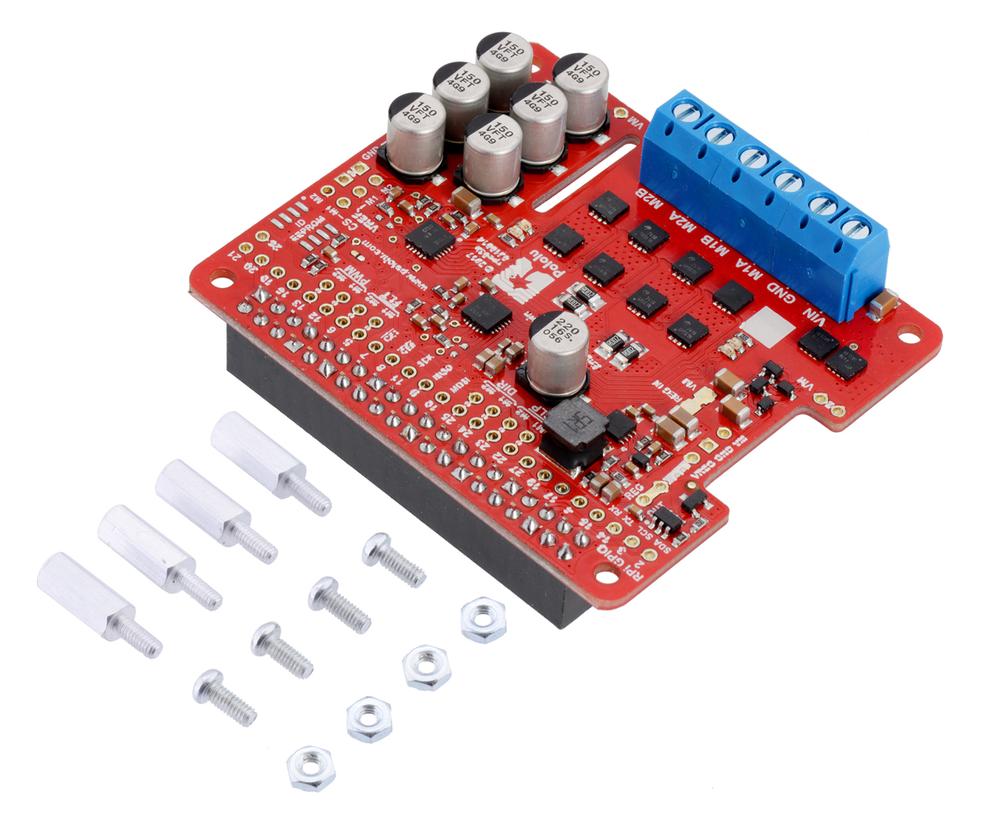
Denna version av 18v18 motorförare är färdigmonterad, med en 2×20-stifts 0,1″ honhuvud (för Raspberry Pi-gränssnittet) och en sexstiftsremsa av 5 mm kopplingsplintar (för kortström och motorutgångar) inlödda. Den kan särskiljas från de andra versionerna av dess röd PCB och numret 150 ovanpå de sex höga elektrolytkondensatorerna i silver i hörnet av kortet. (Se artikel #3750 för en satsversion med kontakter ingår men inte inlödda.)
Fyra M2.5 distanser (11 mm längd), skruvar och muttrar ingår för att fästa kortet till Raspberry Pi på rätt höjd för GPIO-kontakten.
Kortslutningsblock och 0,1 tum hanhuvuden (ingår ej) kan användas för att göra några av de mer avancerade valfria modifieringarna på kortet, till exempel ommappning av kontrollstiften.
Motordrivrutinen inkluderar sex 100 μF eller 150 μF elektrolytiska kraftkondensatorer, och det finns utrymme att lägga till ytterligare kondensatorer (t.ex. för att kompensera för långa strömledningar eller öka stabiliteten hos strömförsörjningen). Ytterligare kraftkondensatorer är vanligtvis inte nödvändiga, och inga ytterligare kondensatorer ingår i denna motordrivrutin.
En Raspberry Pi är ingår ej.
Kraft
En lämplig motorströmförsörjning bör anslutas till motordrivarens stora VIN- och GND-kuddar. Kortet inkluderar en omvänd spänningsskyddskrets som hjälper till att förhindra skador om motorns strömförsörjning ansluts bakåt. Den omvänt skyddade inspänningen kan nås för användning i andra kretsar genom de två stiften märkta VM på vänster sida av kortet. Som standard matar motorns strömförsörjning även en 5 V, 2,5 A switchande nedstegsregulator som ger ström till den anslutna Raspberry Pi.
En idealisk diodkrets på detta kort förhindrar omvänd ström från att flöda in i motordrivkortets 5 V-försörjning om Raspberry Pi drivs separat (till exempel via dess USB-strömuttag). Men, från och med Raspberry Pi 3 Model B+, finns det ingen motsvarande idealisk diodkrets på Raspberry Pi:s USB-strömingång, så det är möjligt för drivrutinen att backa en USB-strömadapter genom Raspberry Pi. Som ett resultat rekommenderar vi inte att du ansluter extern USB-ström till Raspberry Pi medan den drivs via motordrivrutinen.
Backfeeding är inte ett problem med äldre Raspberry Pi-versioner, som har en diodkrets på USB-strömingången. Med Raspberry Pi-versioner före Pi 3 B+ är det säkert att ha en annan strömkälla ansluten till Raspberry Pi via dess USB-uttag medan motordrivrutinen är ansluten och strömförsörjd.
Om du vill driva Raspberry Pi separat, kan regulatorn kopplas bort genom att skära av två exponerade spår på kortet: en mellan ytmonteringsplattorna märkta "VM" och "REG IN", och en annan mellan de två stiften med " REG OUT”-etiketten, som visas till höger. På versionerna 24v14 och 24v18 ökar frånkoppling av regulatorn den absoluta maximala driftspänningen för kortet till 40 V.
Alternativ för motorstyrning
Med PWM-stiftet lågt hålls båda motorutgångarna låga (en bromsoperation). Med PWM hög kommer motorutgångarna att drivas enligt DIR-ingången. Detta tillåter två driftlägen: teckenstorlek, där PWM-driftcykeln styr motorns hastighet och DIR styr riktningen, och låst motfas, där en pulsbreddsmodulerad signal tillförs DIR-stiftet med PWM höll högt.
Vid låst motfasdrift driver en låg arbetscykel motorn i en riktning, och en hög arbetscykel driver motorn i den andra riktningen; en 50 % arbetscykel stänger av motorn. En lyckad låst motfasimplementering beror på att motorinduktansen och omkopplingsfrekvensen jämnar ut strömmen (t.ex. gör strömmen noll i 50 % arbetscykelfallet), så en hög PWM-frekvens kan krävas.
PWM-frekvens
Motordrivrutinen stöder PWM-frekvenser så höga som 100 kHz, men notera att kopplingsförlusterna i drivenheten kommer att vara proportionella mot PWM-frekvensen. Vanligtvis är cirka 20 kHz ett bra val för drift med teckenstorlek eftersom det är tillräckligt högt för att vara ultraljud, vilket resulterar i tystare drift.
En puls på PWM-stiftet måste vara hög under en minsta varaktighet på cirka 0,5 µs innan utgångarna slås på under motsvarande varaktighet (en kortare ingångspuls ger ingen förändring på utgångarna), så låga arbetscykler blir otillgängliga vid höga frekvenser . Till exempel, vid 100 kHz är pulsperioden 10 µs, och den minsta möjliga arbetscykeln som inte är noll är 0,5/10, eller 5 %.
Felförhållanden
Motorföraren kan upptäcka flera feltillstånd som den rapporterar genom att driva FLT-stiftet lågt; detta är en öppen dräneringsutgång som ska dras upp till ditt systems logiska spänning. De detekterbara felen inkluderar kortslutningar på utgångarna, underspänning och övertemperatur. Alla fel inaktiverar motorutgångarna men är inte låsta, vilket innebär att föraren kommer att försöka återuppta driften när feltillståndet är borta (eller efter en fördröjning på några millisekunder i fallet med kortslutningsfelet). Övertemperaturfelet ger en svag indikation på att kortet är för varmt, men det indikerar inte direkt temperaturen på MOSFET:arna, som vanligtvis är de första komponenterna som överhettas, så du bör inte räkna med att detta fel förhindrar skador från överhettning. -temperaturförhållanden.
Ommappning av stift
Alla Raspberry Pi:s GPIO-stift är utbrutna längs en rad med numrerade genomgående hål precis under 40-stifts GPIO-kontakten. Varje GPIO-stift som används av kortet är anslutet från denna rad till motsvarande motordrivstift med ett spår på kortets ovansida som sträcker sig över hålparet. Om du vill mappa om en av dessa motordrivrutiner kan du skära av dess spår med en kniv och sedan dra en tråd från det nedre hålet till ett nytt GPIO-stift.
Observera att standardstiftmappningarna valdes så att Raspberry Pi:s standard GPIO pull-ups och pull-downs matchar riktningen som motordrivrutinens stift är eller bör dras (upp för SF, ned för andra); om du mappar om motordrivrutinens stift utan att vara uppmärksam på detta, kan du stöta på problem med att stiften dras åt fel håll. Se den Raspberry Pi dokumentation för mer om standard GPIO-tillstånden.
Strömavkänning och begränsning
Motordrivrutinen exponerar strömavkännings- och begränsningsstift som inte är anslutna till Raspberry Pi, men de är tillgängliga genom sina egna genomgående hål om du vill använda dem i en mer avancerad applikation.
Föraren har förmågan att begränsa motorströmmen genom strömavbrott: när motorns drivström når ett inställt tröskelvärde, går föraren in i bromsläge (långsam avklingning) i cirka 25 μs innan den sätter på ström för att driva motorn igen. Detta gör det mer praktiskt att använda föraren med en motor som kanske bara drar några ampere under körning men som kan dra många gånger så mycket (tiotals ampere) vid start.
På detta kort (18v18) är den nominella strömbegränsningströskeln inställd på cirka 50 A som standard. För varje motorkanal kan du sänka gränsen genom att ansluta ett extra motstånd mellan VREF-stiftet och det intilliggande GND-stiftet; grafen nedan visar hur strömgränsen relaterar till VREF-motståndsvärdet. Att till exempel lägga till ett 100 kΩ-motstånd mellan VREF och GND sänker strömgränsen till cirka 29 A. Observera att strömbegränsningströskeln inte är särskilt exakt och är mindre exakt vid särskilt låga inställningar (indikeras av den streckade delen av kurvan) .
Förarens strömavkänningsstift, märkta CS, utspänningar proportionella mot motorströmmarna medan H-bryggorna kör. Utspänningen för denna version är cirka 20 mV/A plus en liten offset, som vanligtvis är cirka 50 mV.
Varje CS-utgång är endast aktiv när motsvarande H-brygga är i körläge; den är inaktiv (låg) när kanalen är i bromsläge (långsam avklingning), vilket händer när PWM-ingången är låg eller när strömbegränsningen är aktiv. Ström kommer att fortsätta att cirkulera genom motorn när föraren börjar bromsa, men spänningen på CS-stiftet kommer inte att exakt återspegla motorströmmen i bromsläge. CS-spänningen används internt av motorföraren, så för att undvika att störa förarens drift bör du inte lägga till en kondensator till detta stift eller ansluta en last som drar mer än några mA från den.
Överväganden om kraftförlust i den verkliga världen
MOSFET:erna kan hantera stora strömspikar under korta varaktigheter (t.ex. 100 A under några millisekunder), och förarens strömavbrott kommer att hålla medelströmmen under den inställda gränsen. Toppvärdena är för snabba transienter (t.ex. när en motor slås på för första gången), och den kontinuerliga klassificeringen är beroende av olika förhållanden, såsom omgivningstemperaturen. PWMning av motorn kommer att införa ytterligare uppvärmning proportionell mot frekvensen. Den faktiska strömmen du kan leverera beror på hur väl du kan hålla motorföraren sval. Drivrutinens kretskort är designat för att dra ut värme ur MOSFET:erna, men prestandan kan förbättras genom att lägga till en kylfläns eller luftflöde. För högströmsinstallationer bör även motor- och strömförsörjningskablarna lödas direkt istället för att gå genom de medföljande kopplingsplintarna, som är dimensionerade för upp till 16 A.
Varning: Denna motordrivrutin har ingen övertemperaturavstängning. En övertemperatur eller överström kan orsaka permanent skada till motorföraren. Du kan överväga att använda antingen förarens integrerade strömavkänningsutgång (med en extern ADC) eller en extern strömsensor för att övervaka ditt strömdrag.
Egenskaper
| varumärke | Pololu |
| Modell | 3751 |
Levereras inom 5 till 7 dagar
 Pololu Dual G2 High-Power Motor Driver 18v18 för Raspberry Pi (monterad) Levereras inom 5 till 7 dagar € 104,05
Pololu Dual G2 High-Power Motor Driver 18v18 för Raspberry Pi (monterad) Levereras inom 5 till 7 dagar € 104,05 Alternativa produkter
- Pololu Jrk G2 18v19 USB-motorstyrenhet med återkoppling € 151,65 Visa produkt
- Pololu Högeffekt enkel motorstyrenhet G2 24v12 € 185,75 Visa produkt
- Pololu Dual G2 High-Power Motor Driver 18v22 Shield för Arduino € 144,85 Visa produkt
- Pololu Dual G2 High-Power Motor Driver 18v18 Shield för Arduino € 104,05 Visa produkt
- Pololu G2 High-Power Motor Driver 24v21 € 79,55 Visa produkt
- Pololu Dual G2 High-Power Motor Driver 24v14 Shield för Arduino € 110,85 Visa produkt
- Pololu Högeffekts enkel motorstyrenhet G2 18v15 (anslutningar lödda) € 127,90 Visa produkt
- Pololu Jrk G2 18v27 USB Motor Controller med återkoppling € 136,05 Visa produkt
- Pololu Dual G2 High-Power Motor Driver 18v22 för Raspberry Pi (delsats) € 131,25 Visa produkt
- Pololu G2 High-Power Motor Driver 18v17 € 63,25 Visa produkt
- Pololu Jrk G2 24v13 USB-motorstyrenhet med återkoppling € 151,65 Visa produkt
- Pololu Högeffekt enkel motorstyrenhet G2 24v19 € 149,20 Visa produkt
- Pololu Dual G2 High-Power Motor Driver 24v14 för Raspberry Pi (delsats) € 104,05 Visa produkt
- Pololu Dual G2 High-Power Motor Driver 18v18 för Raspberry Pi (delsats) € 97,25 Visa produkt
- Pololu Dual G2 High-Power Motor Driver 24v18 Shield för Arduino € 144,85 Visa produkt
- Pololu Högeffekt enkel motorstyrenhet G2 24v12 (anslutningar lödda) € 128,10 Visa produkt
- Pololu Högeffekts enkel motorstyrenhet G2 18v15 € 185,75 Visa produkt
- Pololu Dual G2 High-Power Motor Driver 24v18 för Raspberry Pi (delsats) € 131,25 Visa produkt
- Pololu G2 High-Power Motor Driver 18v25 € 79,55 Visa produkt
- Pololu Jrk G2 21v3 USB-motorstyrenhet med återkoppling (anslutningar lödda) € 79,55 Visa produkt
- Pololu Högeffekt enkel motorstyrenhet G2 18v25 € 149,50 Visa produkt
- Pololu Jrk G2 24v21 USB-motorstyrenhet med återkoppling € 206,05 Visa produkt
- Pololu Dual G2 High-Power Motor Driver 24v14 för Raspberry Pi (monterad) € 110,85 Visa produkt
- Pololu G2 High-Power Motor Driver 24v13 € 63,25 Visa produkt
Kundfrågor
Recensioner
- Nedsatt I lager -50 % Pololu 3.3V Step-Up spänningsregulator U1V10F3 € 10,10 € 5,05 Visa produkt
- Nedsatt I lager -50 % Pololu 3,3V, 500mA steg-ned spänningsregulator D24V5F3 € 13,- € 6,50 Visa produkt
- Nedsatt I lager -50 % Pololu 3.3V Step-Up spänningsregulator U1V11F3 € 11,55 € 5,80 Visa produkt
- Nedsatt I lager -50 % Pololu 5V Step-Up/Step-Down Voltage Regulator S18V20F5 € 43,50 € 21,75 Visa produkt
- Nedsatt I lager -50 % Pololu 5V Step-Up spänningsregulator U3V16F5 € 10,10 € 5,05 Visa produkt
- Nedsatt I lager -49 % Pololu Ribbon Cable Premium Jumper Wires 10-Color FF 6" (15 cm) € 4,15 € 2,10 Visa produkt
- Nedsatt 3 pieces I lager -50 % Pololu Skruvlöst terminalblock: 3-stift, 0,1 tums stigning, sidoingång (3-pack) € 3,70 € 1,85 Visa produkt
- Nedsatt I lager -50 % Pololu Strandad tråd: Röd, 28 AWG, 90 fot € 14,45 € 7,25 Visa produkt
- Nedsatt I lager -50 % Pololu Hjul 32×7mm Par - Vit € 6,45 € 3,25 Visa produkt
- Nedsatt 5 pieces I lager -49 % Pololu Minitryckknappsbrytare: PCB-monterad, 2-stift, SPST, 50mA (5-pack) € 3,05 € 1,55 Visa produkt
- Nedsatt I lager -49 % Pololu Mini Slide Switch: 3-stift, SPDT, 0,3A (3-pack) € 3,45 € 1,75 Visa produkt
- Nedsatt I lager -50 % Pololu 5V, 500mA Step-Down Voltage Regulator D24V5F5 € 13,- € 6,50 Visa produkt
- Nedsatt I lager -50 % Pololu 0,100" (2,54 mm) Breakaway Hane Header: 1×40-pin, rak, vit € 1,60 € 0,80 Visa produkt
- Nedsatt I lager -50 % Pololu Trådad tråd: Vit, 20 AWG, 40 fot € 17,35 € 8,70 Visa produkt
- Nedsatt I lager -49 % Pololu Nylondistans: 4 mm längd, 4 mm OD, 2,7 mm ID (50-pack) € 4,85 € 2,45 Visa produkt